PaLM-E: An Embodied Multimodal Language Model
by Community
Project page for PaLM-E: An Embodied Multimodal Language Model.
OSS
PaLM-E: An Embodied Multimodal Language Model
Added 1 June 2026
Overview
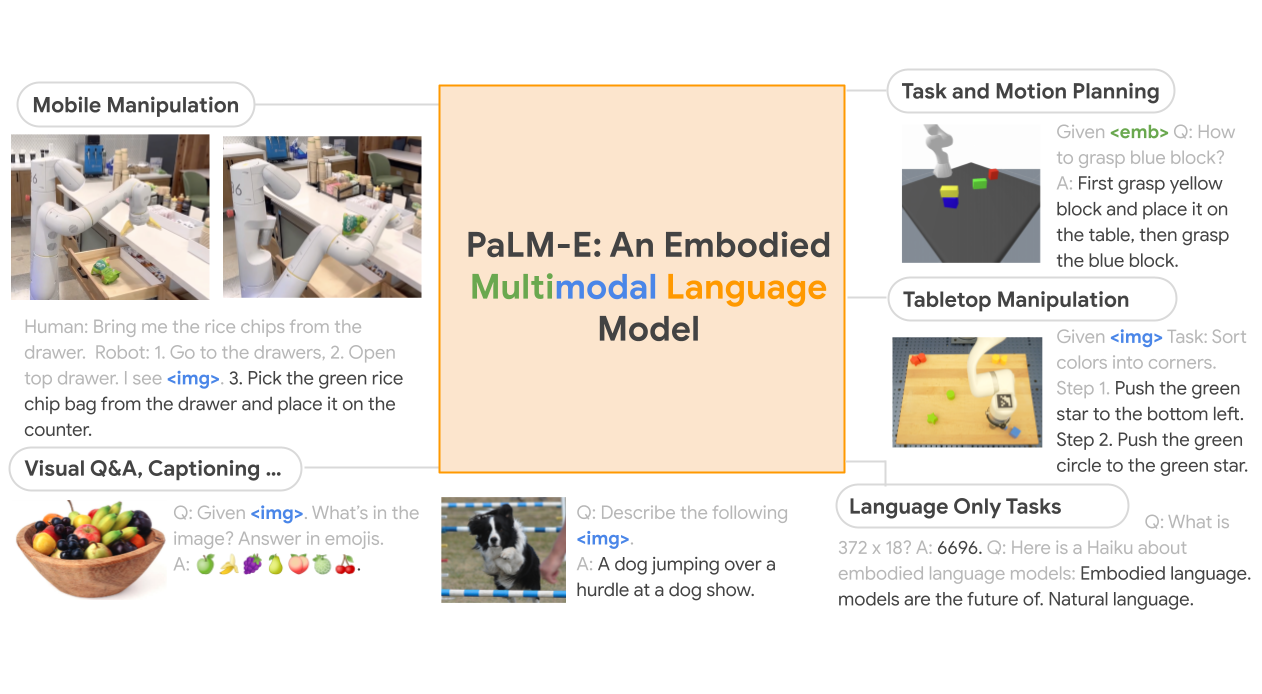
PaLM-E is an open-source framework for building embodied multimodal language models that connect vision, language, and robotic actions. It processes sensory data and text to generate grounded decisions for physical tasks.
Best for
Best for
Researchers and engineers exploring embodied AI with multimodal language models
Use cases
- Training robots to follow natural language instructions
- Integrating visual perception with language understanding for decision-making
- Developing models that reason about physical environments from multimodal inputs
Notes
PaLM-E is an open-source framework for building embodied multimodal language models that connect vision, language, and robotic actions. It processes sensory data and text to generate grounded decisions for physical tasks.
Use cases
- Training robots to follow natural language instructions
- Integrating visual perception with language understanding for decision-making
- Developing models that reason about physical environments from multimodal inputs
Pros
- Combines multiple modalities in a single model
- Open-access project page with research documentation
- Designed for embodied AI tasks
Cons
- Research-stage project with limited production readiness
- Requires significant computational resources to run
- Community-maintained without commercial support
Indexed from awesome-llm and enriched against its public facts.
Pros
- Combines multiple modalities in a single model
- Open-access project page with research documentation
- Designed for embodied AI tasks
Cons
- Research-stage project with limited production readiness
- Requires significant computational resources to run
- Community-maintained without commercial support
Pairs with
Other entries in the index that connect to this one. Click through to see the chain.
Get the free Developer’s Field Guide
A 27-page field guide to the AI coding workflow with Claude. Claude Code, MCP servers, the prompt patterns that work, and what to delegate. Free.
Enter your work email. We send it straight over, plus a few short notes worth knowing. Unsubscribe any time.